Propagation Characteristics for UAVs
Operating at Short Range and Low Altitude
Giselle M. Galvan-Tejada,
Jorge E. Aviles-Mejia,
Aldo G. Orozco-Lugo,
Luis A. Arellano-Cruz,
Ruben Flores-Leal and
Rogelio Lozano-Leal
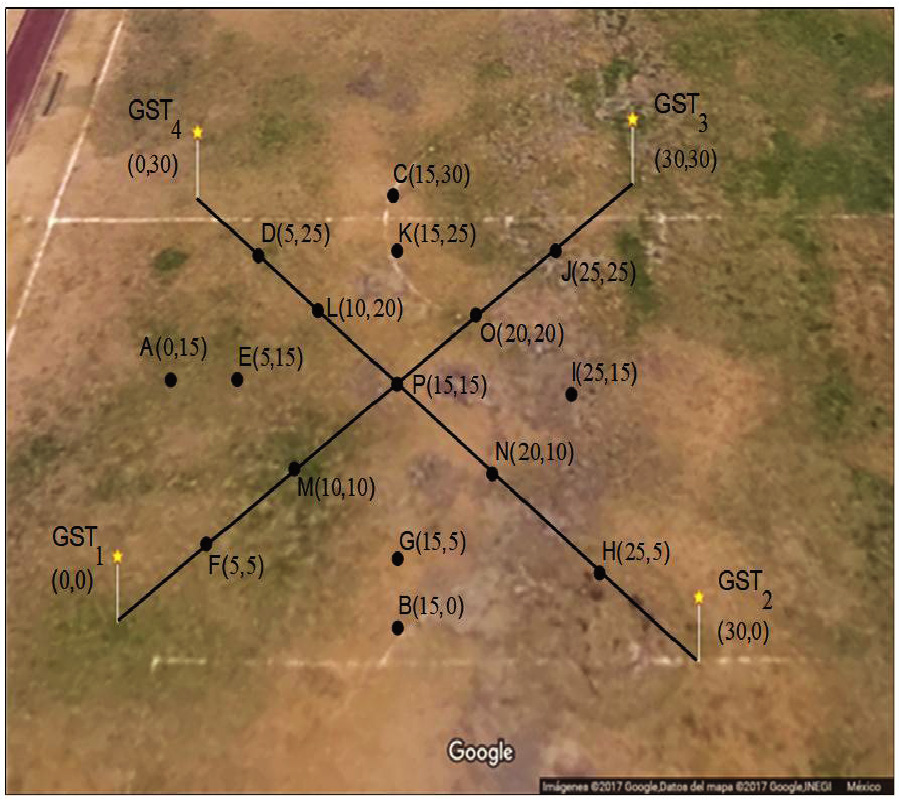
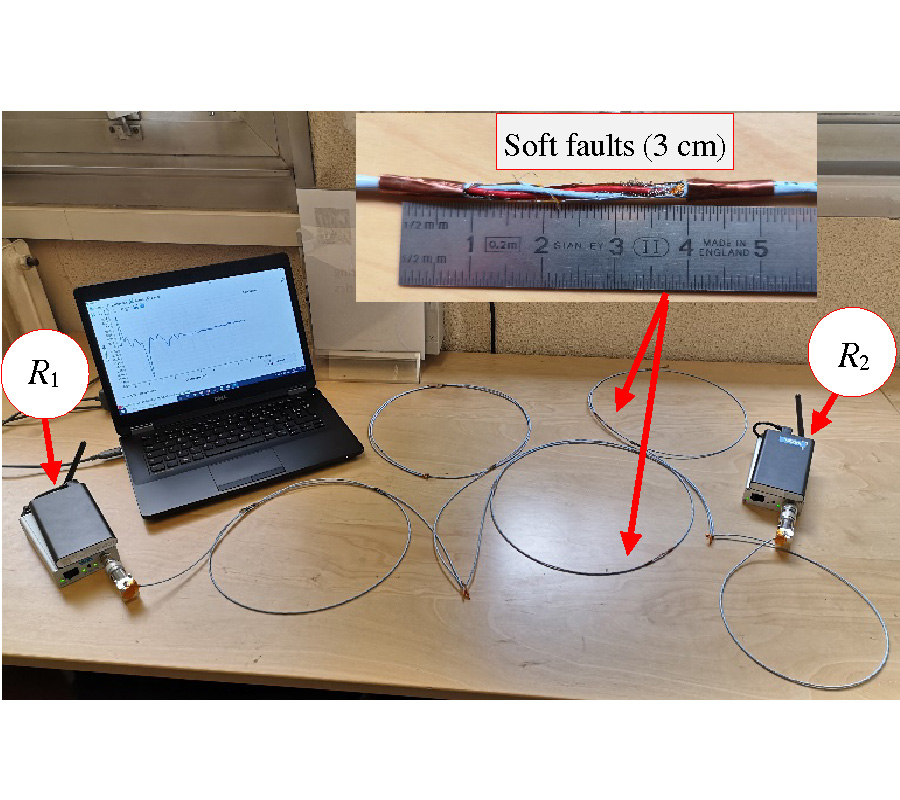
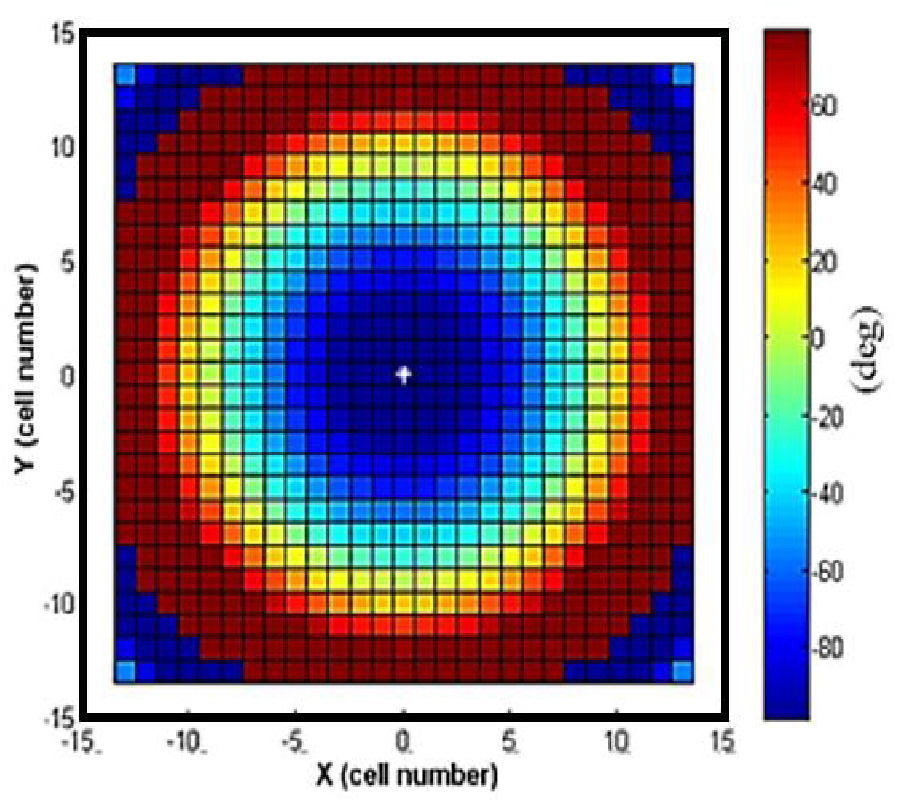
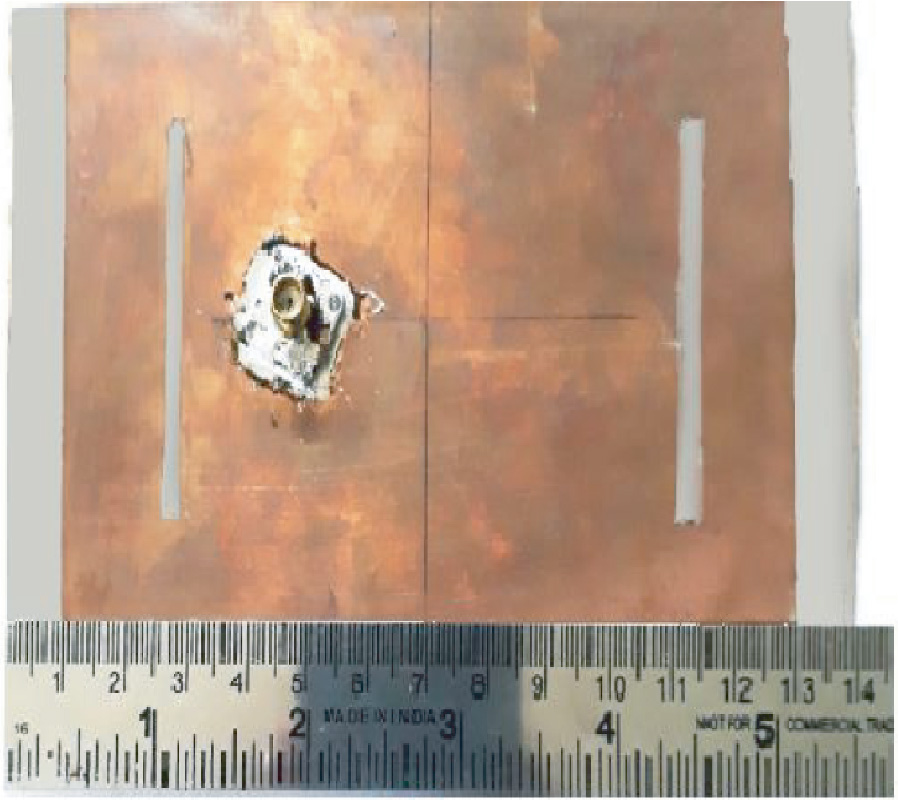
Propagation mechanisms for short range, low altitude conditions are reviewed for their use in communications of unmanned aerial vehicles (UAVs). This study is based on measurements conducted in an obstacle-free area. The testbed is made up of a testing UAV (in particular a drone) and a set of four ground station terminals (GSTs) located in a football field; the antenna heights of radios (onboard the drone and GSTs) are equal to 1.4 m and the maximum distance between them is 50 m. Under these conditions, a plane earth geometry is well suited, and therefore the two-ray propagation model is considered. Measurement results for a radial configuration of the drone with respect to a ground station follow the trend of this model, but with a shift, which is attributed to the scattering from the grass. Then, an adjusted two-ray model is proposed for which experiments report good results. For another configuration where the drone has different positions in a square area of 30 × 30 m and there are four ground stations in the corners of the square, the general trend of the power decay of measurement results follows this model, but in some positions a difference around it is found even for locations at the same distance drone-GTSs. This behavior is attributed to the interaction of the print circuit board to the radiation characteristics of the antenna used in the radios. Thus, this effect is also analyzed by simulations, whose results show a deformation of the antenna radiation pattern, concentrating the energy in a certain direction and reducing it in another.